
Abstract
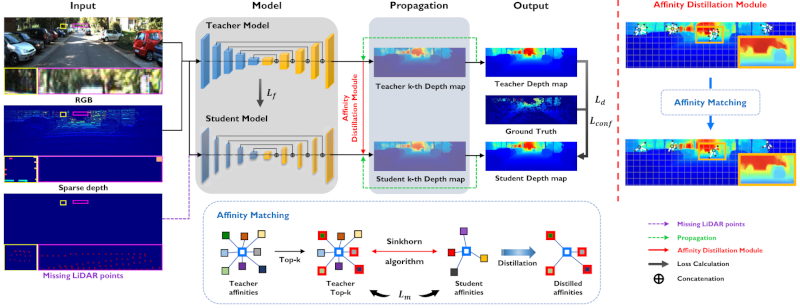
Depth completion is one of the crucial methods to estimate dense depth information of surrounding environments for various real-world applications such as autonomous driving, robotics, and augmented reality. In these real-world applications, it is strictly required for a depth completion model to achieve lightweight network architectures and reduced computational costs to operate in real-time. With this in mind, we propose a non-local affinity distillation network for lightweight depth completion. Our method utilizes a minimal number of neighbors with strong affinities for fast spatial propagation by optimal transport between teacher and student affinities through knowledge distillation. Moreover, existing depth completion algorithms solely focus on exploiting measured LiDAR points of objects while disregarding miss- ing ones fired into the air completely. Since missing rays of a LiDAR sweep can be easily identified based on the data acquisition pipeline of LiDAR sensors, we propose to utilize guidance from missing LiDAR points to further improve the performance of our network especially in regions without LiDAR points. Experimental results show that our method is superior to previous lightweight networks as well as comparable to heavy depth completion methods.